3D Vision System
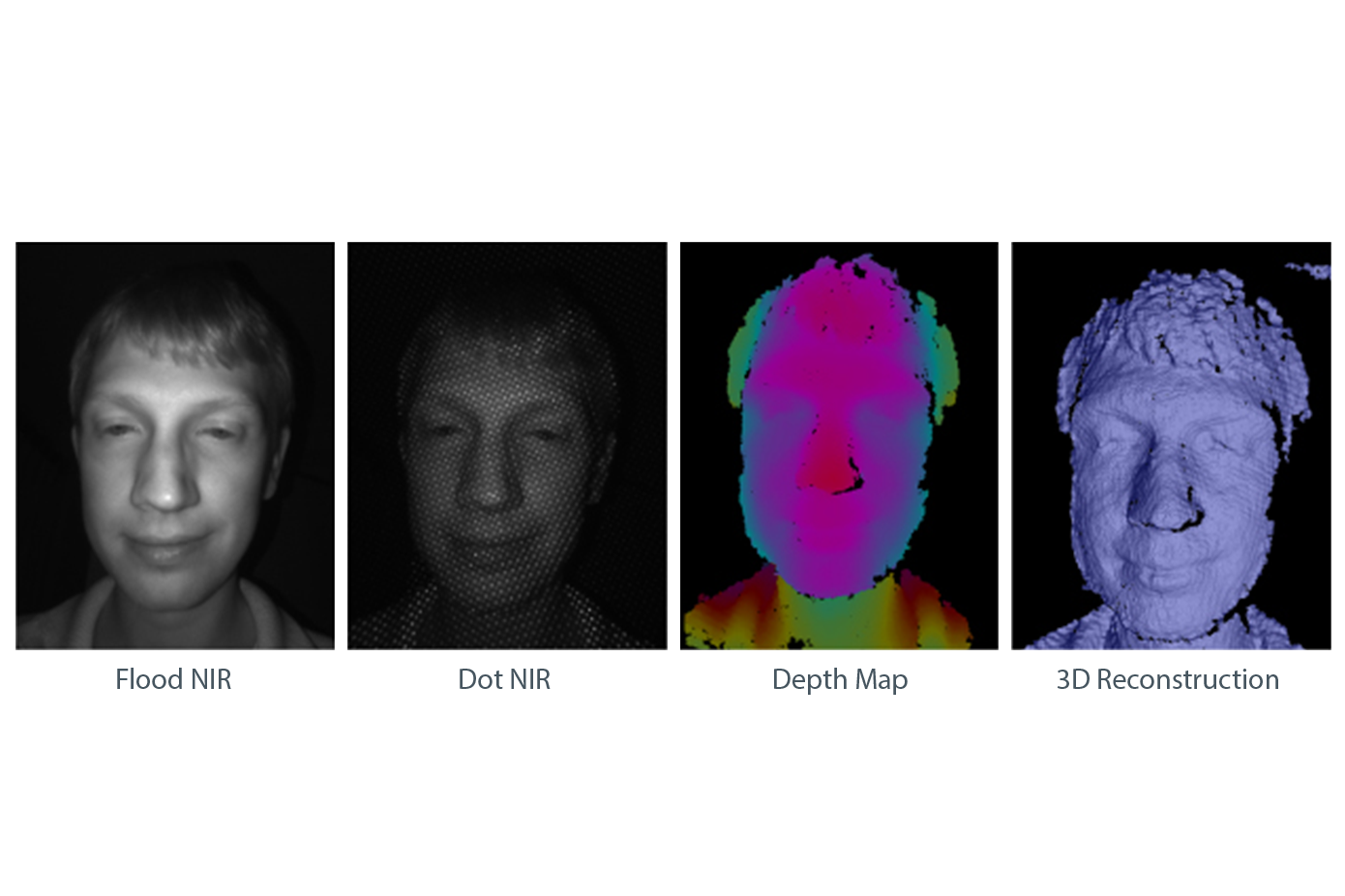
Flood NIR: near-infrared image, acquired with assist of a PMSILPlus flood illuminator. These images are used for 2D image analysis that will be fused with the 3D image data.
> More about flood illuminator Merano-Hybrid
> More about flood illuminator Merano-PD
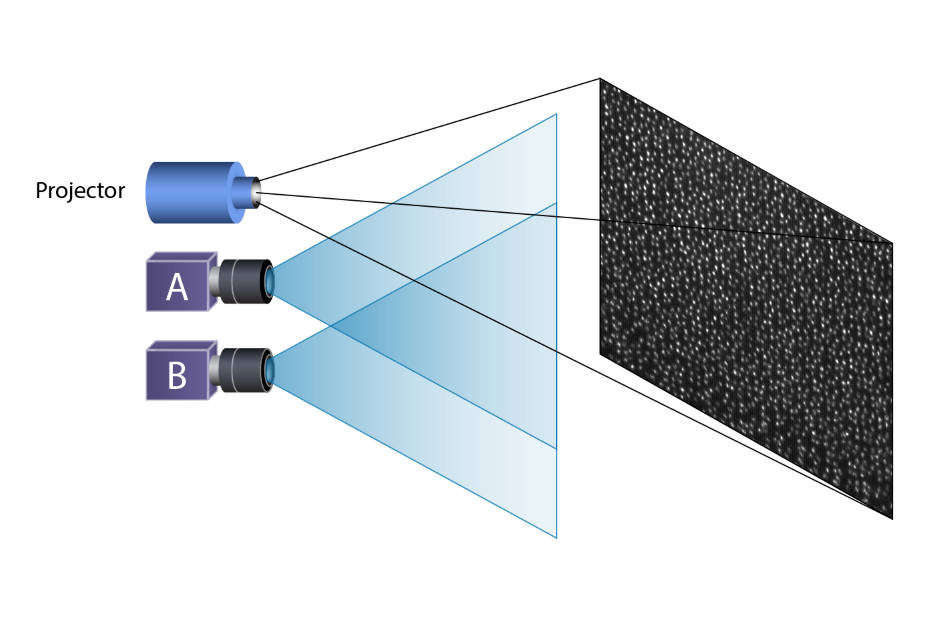
Dot NIR: near-infrared image, acquired with assist of a dot projector. The dot pattern is enhancing contrast in the image to provide a very good depth map in all lighting conditions with low contrast objects in the scene.
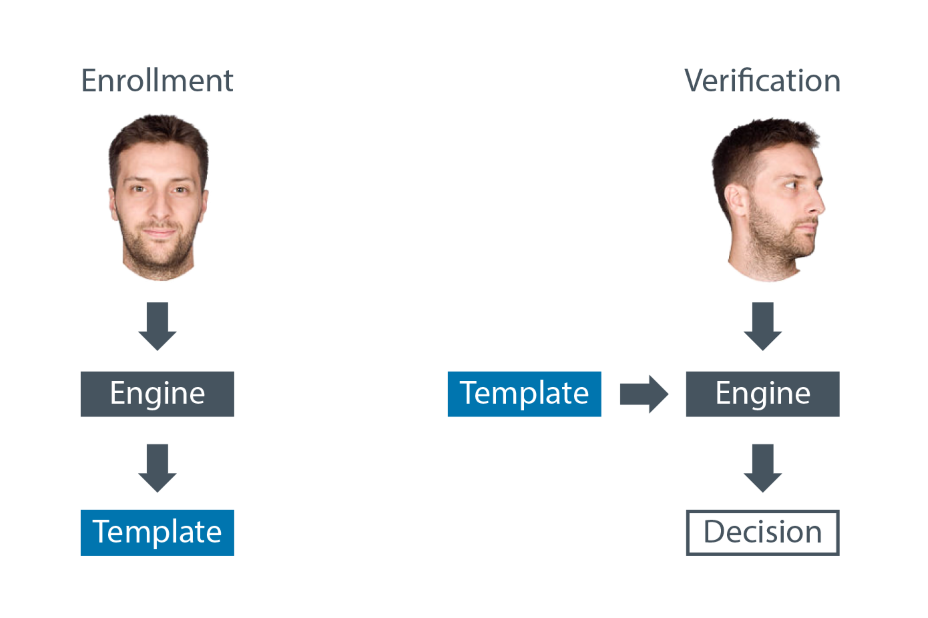
Depth Map: ams face recognition use depth map information of the user’s face. A facial depth map is a set of thousands of coordinates mapped in three-dimensional space describing the contours of the surface of the user’s head relative to a single point of view in front of the user. This depth map may be compared with a reference depth map of the user’s face to authenticate the user.
Reconstructed 3D image is handed over to the application software for further use case specific processing (e.g. face recognition).